.png?sfvrsn=ff199933_15)
IHPC Tech Hub
Discover the power of computational modelling, simulation and AI that brings about positive impact to your business.
- Health & Human Potential
- Manufacturing & Engineering
- Smart Nation & Digital Economy
- Transport & Connectivity
- Urban Solutions & Sustainability
Human-Robot Collaborative Artificial Intelligence (Collab AI)
- Learning to recognise new objects through visual self-exploration
- Learning new tasks by observing human demonstration and teaching, which allows non-experts to work with robots without needing to explicitly program them
- Collaborating naturally with humans on tasks with visual & tactile guidance, natural speech/dialogue interaction and AR interface
Features
- Enables natural collaboration with humans
- Integrates multi-modal perception and dialogue capability
- Leverages commonsense knowledge
- Uses a cognitive architecture as a basis for integration
- Stays agnostic to the robotic platform
- Supports learning from instructions and/or demonstrations
The Science Behind
Cognitive Architecture
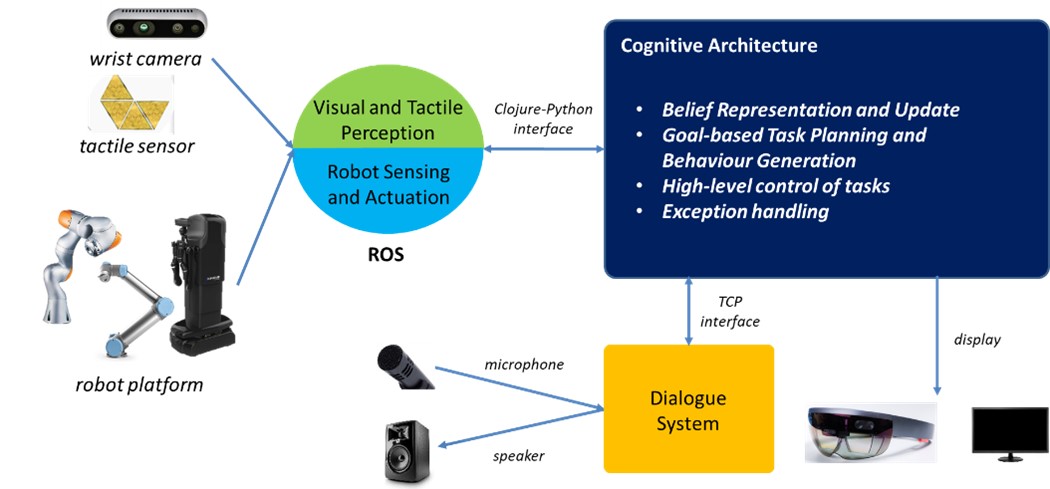
A cognitive architecture (CA) implements a principled and cognitively inspired theory of robotic intelligence that provides capabilities for:
- Maintaining common ground on task and human states (working/episodic memory)
- Reasoning about percepts and goals (inference)
- Planning and executing actions (problem-solving, skill retrieval)
- Learning from experience (skill learning)
- Integrates lower-level robotics capabilities
- Allows for high-level approaches to Task Planning and Behaviour Generation which,
- Is Goal-driven rather than State-driven
- Allows for abstract skill specification instead of hardware-specific programmes
- More intelligently handles exceptions
- Provides significant benefits like reusability and generality compared to ad-hoc robotic architectures
[Watch the video] The ability of the CA for maintaining object permanence (i.e., remembering/tracking objects that go out of visual view).
Programming-Free New Object Registration
Collab AI developed a new method to teach the robot to recognise new objects through visual self-exploration. This method is called “Teaching with Active and Incremental Learning for Object Registration (TAILOR)”.
About TAILOR:
- Provides an interactive process for training a deep-learning based object detector
- Alleviate the need for costly and tedious data collection and annotation
- Allow non-expert users to teach the system to recognise new objects without the need for programming
Teaching by Demonstration
.png?sfvrsn=6b8397fa_1)
Collab AI developed a Collaborative Human-Robot Intelligent System (CHRIS) which allows a non-expert user to automatically program a robot through teaching demonstration.
- Teach and interact with robots in natural and efficient human-like manner
- Teach robots to learn task procedural knowledge from human demonstration
- Transfer learned skills to new tasks and robot execution with minimum prior knowledge
CHRIS was demonstrated at 2021 Hannover Fair Messe and was a Top 5 finalist for the Kuka Innovation Award 2021.
Robust Skill Learning
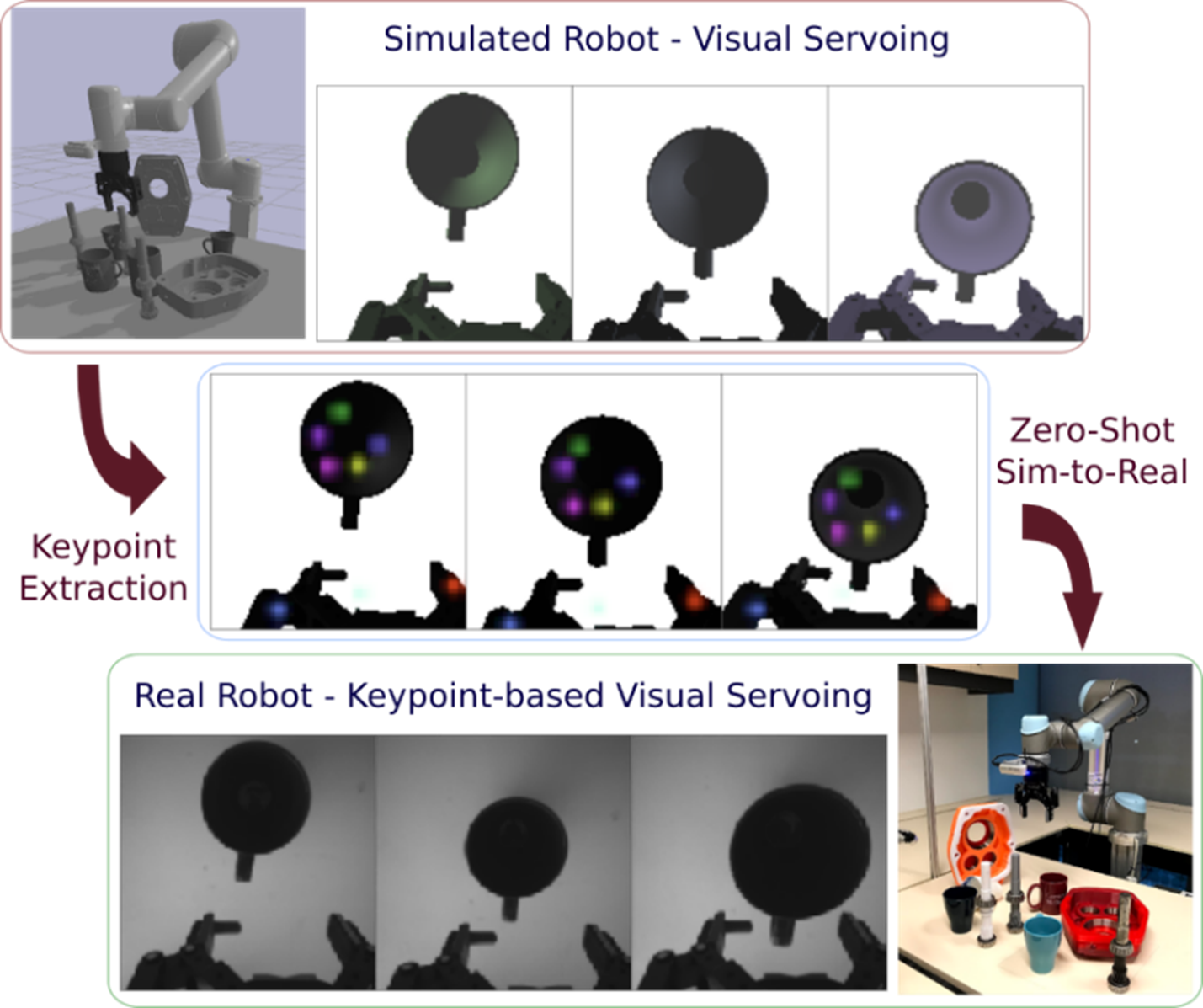
Collab AI developed a general key-point based end-to-end learning framework for skill learning for low-level tasks:
- Zero-shot sim-to-real transfer
- No camera calibration is needed
- Tolerant to noisy workplace
- Results:
o Shows good task generalisation
o Achieved good success rate and training efficiency: Outperforms the baseline methods with AE-based and VAE-based
Natural Interaction via Voice
Collab AI developed capabilities for natural dialogue interaction which allows humans to learn from robots by asking questions, and querying the system about tasks, objects and robot status.
- Reduce training costs for new team members, by answering basic questions from them
- Reduce time for switching between hands-on work and machine monitoring, where robots can answer questions about machine states
- Achieve high accuracy with a small dataset of dialogue Q&As
Industry Applications
Collab AI technologies can be applied to complex tasks that cannot be fully automated and require human inputs to allow robots to be deployed more effectively to augment humans. Other possible applications include work-cells for hyper-customised manufacturing with easy process adaptation through robot teaching.
- Collaborative automated programming for testing consumer products
- Collaborative harvesting of edible plants
#Collab AI is an AME Programmatic Programme led by IHPC in collaboration with I2R, ARTC, NUS, NTU and SUTD.
A*STAR celebrates International Women's Day

From groundbreaking discoveries to cutting-edge research, our researchers are empowering the next generation of female science, technology, engineering and mathematics (STEM) leaders.
Get inspired by our #WomeninSTEM